Reflex Mechanism
Authors
Guoyuan Li & Houxiang Zhang
Introduction
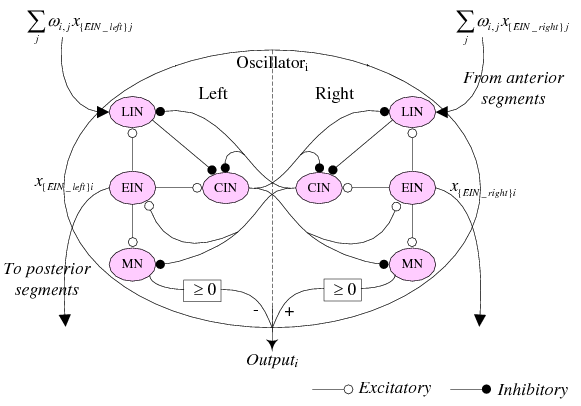
We have developed a central pattern generator (CPG) based on biomimetic neural circuits, to simulate the locomotion of limbless animals. The topology of the proposed CPG model is biologically inspired from the neuronal circuit diagram in the spinal cord of swimming lampreys, as shown in Fig. 1. A set of leaky integrator type interneurons are incorporated in the neural diagram design for rhythmic signal generation. The CPG model not only provides explicit parameters for output modulation, including the modulation of amplitude, period, phase difference and offset, but also provides a solution for realizing the sensory reflex mechanism witnessed on lampreys.
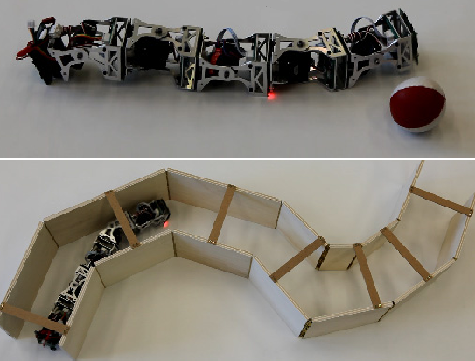
In addition, the sensory reflex mechanism is also integrated into the CPG model, which is designed based on the monosynaptic reflex. To evaluate its reflex efficiency, we develop two experiments: ball hitting and corridor passing, as shown in Fig. 2. First, the simple ball hitting experiment is carried out to check whether the robot is able to respond correctly to external stimuli. A more complicated scenario is then set as an application of the reflex mechanism, which requires the robot with a forward motion to pass through a narrow and winding corridor. As a result, the on-site experiments validate the feasibility of our reflex mechanism.