Our main mathematical tool to model alpine ski is known as isogeometric analysis (IGA), which is basically an extension of the finite element method (FEM) using non-uniform rational B-splines (NURBS) as basis functions. Being introduced in 2005 by Hughes et al., followed by a book in 2009, IGA tries to bridge the gap between finite element analysis and CAD design tools. The important future of IGA is that it uses the same basis as CAD software for describing the given geometry, and thus exact representation of the model is possible. It is therefore natural to include a section considering this basis in the beginning before we set up the IGA. Note that only the relevant parts of the IGA will be presented, and even here we shall be brief. The text assumes the reader is somewhat familiar which the finite element method.
The underlying assumption for our analysis is linear elasticity. The resulting equations will be the fundamental equations to which we apply IGA. The notation will be presented and the complete partial differential equation will be presented.
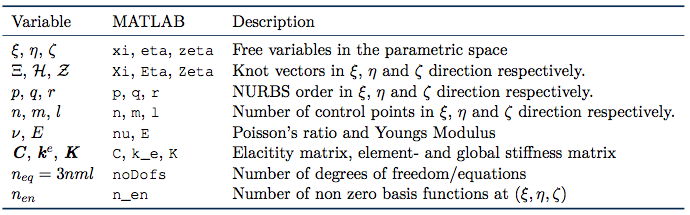
Initially the IGA implementation was entirely based on the library given in the article “Isogeometric analysis: an overview and computer implementation aspects”. This library have implemented NURBS calculations in C, and have a lot of other artillery which we will not need. We have rewritten all code implemented in C into MATLAB, and many more adjustments have been done, even some optimalizations concerning how the sparse global stiffness matrix is built. In this regard it must be noted that the original code written in C is faster then the corresponding rewritten code in MATLAB. It was not necessary to rewrite all parts of the library, so only the parts which are edited will be presented in whats follows. For the remaining part of the code, we refer to the article “Isogeometric analysis: an overview and computer implementation aspects”. When presenting the theory, we shall consecutively present the corresponding implementation in MATLAB. In this regard we present explanations for the most important variables used, and writes the corresponding variable names used in MATLAB, in the table below.
NURBS
The NURBS basis is built by B-splines. So an understanding of B-splines is crucial to understanding NURBS. Let  be the polynomial order, let
be the polynomial order, let  be the number of functions and let
be the number of functions and let  be an ordered vector with non decreasing elements (referred to as a knot vector). Then, the B-spline
be an ordered vector with non decreasing elements (referred to as a knot vector). Then, the B-spline  are recursively defined by (for
are recursively defined by (for  )
)
(1) 
and for  we have
we have

This forumla is referred to as Cox-deBoor formula, and the derivative of a spline may be computed by

Throughout the project we shall use open knot vectors. That is, the first and last element in the vector is repeated  times. Moreover, we shall use normalized knot vectors, which simply spans from 0 to 1. We shall build upon this information to optimize algorithms. When we want to evaluate a B-spline at a fixed
times. Moreover, we shall use normalized knot vectors, which simply spans from 0 to 1. We shall build upon this information to optimize algorithms. When we want to evaluate a B-spline at a fixed  it is important to note that it is very redundant to evaluate all basis function. This is due to the small support of each function. In fact, it turns out that only (at most) basis functions are non-zero at . It is important to then only use these function to have an efficient code. One typically then implements a function which find the span corresponding to a given . Due to the ordering of the knot vector, we may use a binary search algorithm for finding this span. The span will be defined by the index
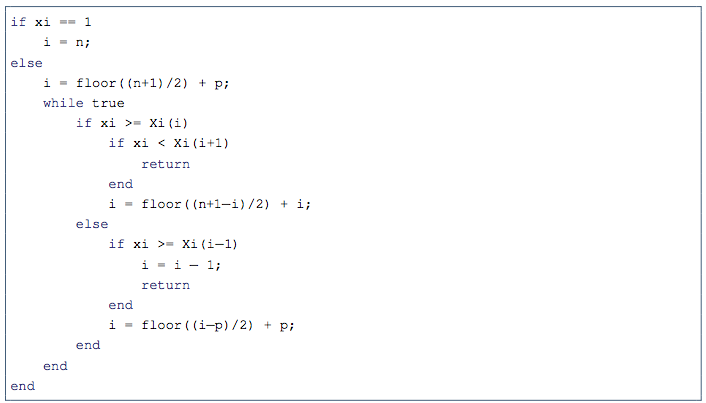
it is important to note that it is very redundant to evaluate all basis function. This is due to the small support of each function. In fact, it turns out that only (at most) basis functions are non-zero at . It is important to then only use these function to have an efficient code. One typically then implements a function which find the span corresponding to a given . Due to the ordering of the knot vector, we may use a binary search algorithm for finding this span. The span will be defined by the index  corresponding to the first basis function which is non-zero at . The following listing represents the algorithm called findKnotSpan.m:
corresponding to the first basis function which is non-zero at . The following listing represents the algorithm called findKnotSpan.m:
As an example, if  and
and  and we want to evaluate a B-spline with the knot vector
and we want to evaluate a B-spline with the knot vector  , we get the index
, we get the index  if
if  ,
,  if
if  and
and  if
if  or
or  .
.
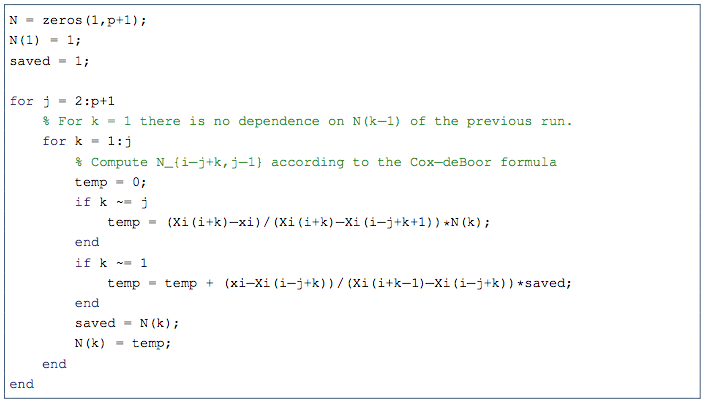
We are now ready to implmenet a program which evaluates B-splines using the previous routine. When the recursion formula is used to evaluate the functions which are non-zero at , the function  is the only function of order zero which is non-zero at . Everything is thus build from this function. We then have the following graph
is the only function of order zero which is non-zero at . Everything is thus build from this function. We then have the following graph
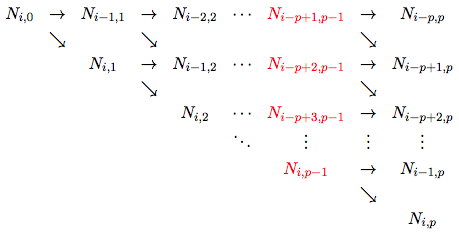
where the values colored red is used to calculate the nonzero derivatives at the same . It is then clear that we need two loops. The outer loop should iterate over the columns of this graph and the inner loop should iterate over the rows. The output of the function Bspline_basis is simply an array N which contains the functions which are evaluated at . To save memory one should also store the intermediate values  in this same array. Thus, we need to store N(k-1) to compute N(k) (which we store in the variable saved). Here,
in this same array. Thus, we need to store N(k-1) to compute N(k) (which we store in the variable saved). Here,  is the loop index of the outer loop, while
is the loop index of the outer loop, while  is the loop index of the inner loop. The first iteration (when ) should be done seperately with 1. Finally, we use the convention that
is the loop index of the inner loop. The first iteration (when ) should be done seperately with 1. Finally, we use the convention that  .
.
A way to veryfy this implementation is to check that the nonegativity and the partion of unity holds,

which is important properties of B-splines. We will finally need to compute the corresponding derivatives. Once again, only derivatives will be non zero at . Let N_tilde be an array containing the red values in the previous graph. We may then compute these as in the following listing

Since we only need these derivatives also when the corresponding values for the basis function is needed, we extend the function Bspline_basis into a new function called Bspline_basisDers. We then avoid redundant calculations.
A B-spline volume may now be represented by
(2) 
where  contains the
contains the  controlpoint of the volume. For a given
controlpoint of the volume. For a given  , this formula does a lot of redundant computations as discussed so far. Namely, given a , only
, this formula does a lot of redundant computations as discussed so far. Namely, given a , only  basis functions will contribute. If these nonzero basis functions evaluated at a given point are stored in M, N and L, we may rewrite 2 as
basis functions will contribute. If these nonzero basis functions evaluated at a given point are stored in M, N and L, we may rewrite 2 as

where

and  ,
,  and
and  are knot span index corresponding to ,
are knot span index corresponding to ,  and
and  , respectively. This observation will be used frequently when dealing with corresponding sums in the NURBS basis.
, respectively. This observation will be used frequently when dealing with corresponding sums in the NURBS basis.
Given a set of weights  corresponding to each basis function the NURBS basis functions in 3D may be expressed by
corresponding to each basis function the NURBS basis functions in 3D may be expressed by
(3) 
where

The partial derivatives of these functions is then given by the quotient rule
(4) 
where

and

Similar expressions may be found for the partial derivatives with respect to and . We may now insert all of this into a routine which computes the nonzero basis functions at a given point and the corresponding nonzero derivatives. This function is called NURBS3DBasisDers. After finding the nonzero B-spline functions and their corresponding derivatives as discussed above, it continues by first finding the function  and it’s corresponding derivatives. This is illustrated in the following listing.
and it’s corresponding derivatives. This is illustrated in the following listing.
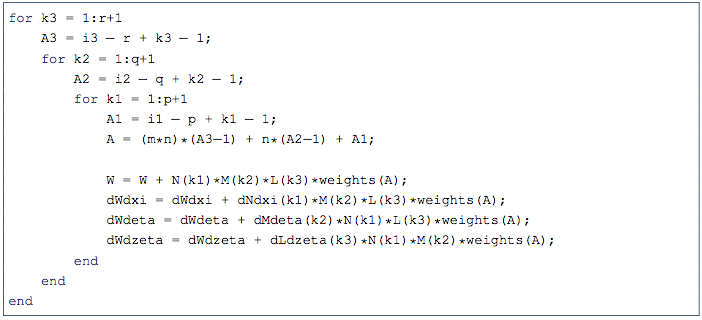
Note the use of the index A which is convenient when weights is located in an long array (which is the format we shall use when doing the IGA analysis). Finally, the function can now compute the NURBS basis alongside the corresponding derivatives as shown in the following listing.
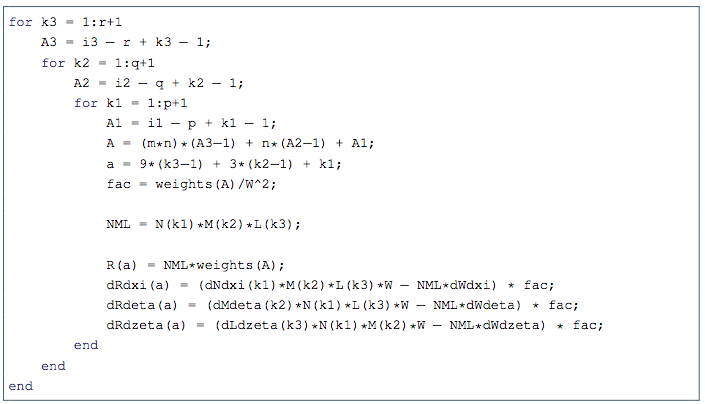
Note the use of the intermediate variables fac and NML which is used to avoid redundant computations. The index a loops over the  nonzero functions.
nonzero functions.
Linear elasticity
One important assumption for using linear elasticity is that only small deformations of the material occurs. This is due to the linearized quantities. We shall here not go in detail on how to derive the needed equations from Hooke’s law, but we present the notation used in the formulation of the isogeometric analysis.
The notations used, takes inspirations from the book by Hughes. In this section, the indices , , and  will denote a specific spatial direction. We shall model everything in three dimensions, such that
will denote a specific spatial direction. We shall model everything in three dimensions, such that  . Moreover,
. Moreover,  shall denote the
shall denote the  component of the vector
component of the vector  and differentiation is denoted with a comma such that
and differentiation is denoted with a comma such that

Finally, we use the convention that if an index is repeated, it imply summation. That is,

and

Note that we do not sum over in the latter example since the quantities are separated by a plus sign. Define now the symmetric part of a general tensor ![\vec{A}=[A_{ij}]](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-24d086b837ca75bb0a5b9a4dde0d8fc5_l3.png "Rendered by QuickLaTeX.com") to be
to be

and note that if ![\vec{B}=[B_{ij}] = [B_{(ij)}]](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-a5ed506cec91e70b2d2211f4d06eb58c_l3.png "Rendered by QuickLaTeX.com") is a symmetric tensor, then
is a symmetric tensor, then
(5) 
That is, we can combine the components of  which are equal to reduce redundant computations.
which are equal to reduce redundant computations.
Let now  denote the Cartesian components of the Cauchy stress tensor and let
denote the Cartesian components of the Cauchy stress tensor and let  denote the infinitesimal strain tensor which is defined by
denote the infinitesimal strain tensor which is defined by

We can now state the relation between as using the generalized Hooke’s law as

where  are elastic coefficients. In the case of isotropic material, these coefficients are given by
are elastic coefficients. In the case of isotropic material, these coefficients are given by

where the Kronecker delta function is given by

and the parameters  and
and  are Young’s modulus and Poisson’s ratio respectively. We are now ready to state the strong form of the linear elasticity problem in three dimensions.
are Young’s modulus and Poisson’s ratio respectively. We are now ready to state the strong form of the linear elasticity problem in three dimensions.
Let  be the domain with a boundary
be the domain with a boundary  which is composed of two parts;
which is composed of two parts;  and
and  . These are called Dirichlet and Neumann boundary conditions, respectively, and satisfies
. These are called Dirichlet and Neumann boundary conditions, respectively, and satisfies  and
and  . Moreover, let the functions
. Moreover, let the functions  ,
,  and
and  be given. Then, find
be given. Then, find  such that
such that
(6) 
for  . In this project, we will only consider boundaries which are entirely Neumann boundaries or Dirichlet boundaries, respectively. That is,
. In this project, we will only consider boundaries which are entirely Neumann boundaries or Dirichlet boundaries, respectively. That is,  and
and  for all .
for all .
In this project, we neglect any body forces such as gravity, such that  . Moreover, we shall only need homogeneous Dirichlet conditions such that
. Moreover, we shall only need homogeneous Dirichlet conditions such that  .
.
The weak form and Galerkin’s Method
The weak form of the problem is derived from the strong form. Typically, one defines two classes of functions:  denotes the solution space and
denotes the solution space and  denotes the weighting space for a given spatial component . These spaces are made in order to handle non homogeneous Dirichlet boundary conditions, but since we have homogeneous Dirichlet boundary conditions, these spaces will be the same. That is,
denotes the weighting space for a given spatial component . These spaces are made in order to handle non homogeneous Dirichlet boundary conditions, but since we have homogeneous Dirichlet boundary conditions, these spaces will be the same. That is,  for . Typically, is a subspace of the Sobolev space
for . Typically, is a subspace of the Sobolev space  (which consist of all functions which have square-integrable derivatives) with a condition such that the Dirichlet boundary condition is satisfied.
(which consist of all functions which have square-integrable derivatives) with a condition such that the Dirichlet boundary condition is satisfied.
We now multiply each of the equations in 6 by a corresponding test functions  and sum these three equations into one single equation given by
and sum these three equations into one single equation given by

which can be written as

where

Integrating over the domain yields
(7) 
Consider the divergence theorem

with  . Note that
. Note that

which inserted in the divergence theorem yields

We may now insert this into 7 such that
(8) 
Note that we only integrate over the Neumann part of the boundary since the integral over the vanishes (the test function  is zero at this boundary). Also note that the domain of integration for the boundary integral is depending on . Returning to the index summation convention we may rewrite 8 as
is zero at this boundary). Also note that the domain of integration for the boundary integral is depending on . Returning to the index summation convention we may rewrite 8 as

which using the boundary conditions, and the fact that for our case, may be written as

Note that since ![[\sigma_{ij}]](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-8dfcaa8ec202c0a4114392ce2bb0f1ce_l3.png "Rendered by QuickLaTeX.com") is a symmetric tensor, we have used 5 to only write the symmetric part of
is a symmetric tensor, we have used 5 to only write the symmetric part of  . If we now define the space
. If we now define the space  we can state the weak formulation in a concise form: Find
we can state the weak formulation in a concise form: Find  such that for all
such that for all  we have
we have

where
(9) 
and

Here we have used the relation  .
.
We now want to transform this weak statement into a system of algebraic equations. We here apply Galerkin’s method and now turn to a finite-dimensional subspace  . The basis for this subspace is the presented NURBS basis. But note that we will have vector valued control variables. The Galerkin approximation of the weak form is now given by: Find
. The basis for this subspace is the presented NURBS basis. But note that we will have vector valued control variables. The Galerkin approximation of the weak form is now given by: Find  such that
such that
(10) 
for all  .
.
To find the system of algebraic equations we need to write  as a linear combination of the basis functions. First, let
as a linear combination of the basis functions. First, let  (where
(where  is the number of basis functions) be the set containing the indices of all the functions in the NURBS basis defining the geometry and let
is the number of basis functions) be the set containing the indices of all the functions in the NURBS basis defining the geometry and let  be the set containing the indices of all the basis functions that are non-zero on
be the set containing the indices of all the basis functions that are non-zero on  . Due to the homogeneous Dirichlet boundary condition, we may write the component of
. Due to the homogeneous Dirichlet boundary condition, we may write the component of  and the
and the  component of as
component of as
(11) 
respectively, where  denotes set subtraction. Using the same index summation convention we may now write
denotes set subtraction. Using the same index summation convention we may now write
(12) 
where the unit vectors  are given by
are given by

The finale step is now to insert 12 (using 11) into 10 such that we obtain a matrix formulation of the problem. Insertion yields

which using the bilinearity of  and the linearity of
and the linearity of  may be written as
may be written as

Since the coefficients  is arbitrary (the relation should hold for all
is arbitrary (the relation should hold for all  ) the term in the parentheses must vanish. That is, for all
) the term in the parentheses must vanish. That is, for all  and we have
and we have

One should typically make a system of the ordering of these equations. That is, one should create a function  which collapse the indices and
which collapse the indices and  into a single index. A given equation then has the index
into a single index. A given equation then has the index  and the index over all unknown components of the displacement vectors are called
and the index over all unknown components of the displacement vectors are called  . The resulting system of equation may then be written as
. The resulting system of equation may then be written as

where
![\begin{equation*} \vec{K} = [K_{PQ}],\\ \vec{U} = \{d_Q\},\\ \vec{F} = \{F_P\}, \end{equation*}](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-6bba954abeb9fe9b0b8d10eea33cf1bc_l3.png "Rendered by QuickLaTeX.com")
and

Assembly
As for the finite element method, one typically do not loop through the basis functions. Rather, we loop through the elements constructing local stiffness matrices and successfully place their element in the global stiffness matrix. Let us first introduce some notations. The elastic coefficients are typically inserted in a matrix  called the elasticity matrix. It is defined by
called the elasticity matrix. It is defined by

or in our case, more explicitly by

Moreover, define the strain vector and the stress vector to be

Then

such that we may write the bilinear form in 9 as

Also note that

where

The entries in the global stiffness matrix may then be written as

Let  be the domain of a given element, where the index
be the domain of a given element, where the index  loops over all elements. The support of the NURBS are highly localized. To reduce computations, we should only integrate over functions which have support in . If we have
loops over all elements. The support of the NURBS are highly localized. To reduce computations, we should only integrate over functions which have support in . If we have  such \local shape functions, and let and
such \local shape functions, and let and  iterate over these functions, we may calculate the entries in the local stiffness matrix as
iterate over these functions, we may calculate the entries in the local stiffness matrix as

where

The local force vector may similarly be calculated by
(13) 
The integration is done by quadrature formulas. One first maps to the parametric domain, and then map this domain to a parent domain. The element in the parametric domain, corresponding to , is given by
![\begin{equation*} \hat{\Omega}^e= [\xi_i,\xi_{i+1}]\times[\eta_i,\eta_{i+1}]\times[\zeta_i,\zeta_{i+1}]. \end{equation*}](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-a60b57c5d60ac9f311d825c95e50947d_l3.png "Rendered by QuickLaTeX.com")
In three dimension we want to map this domain into the parent domain given by
![\begin{equation*} \tilde{\Omega}^e = [-1,1]\times[-1,1]\times[-1,1]. \end{equation*}](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-ee4b3989717c21cf2c5ff7336bbcfb3b_l3.png "Rendered by QuickLaTeX.com")
So given  , we calculate
, we calculate  by
by



The Jacobian determinant for the parametric to parent mapping is thus given by

Similarly, we need the Jacobian for the mapping from the physical domain into the parametric domain. Given , we calculate  by
by

where  are the control points and
are the control points and  are the NURBS basis functions which are computed by 3. Note that the last equality again comes from the highly localized support of the NURBS basis. The Jacobian matrix is thus given by
are the NURBS basis functions which are computed by 3. Note that the last equality again comes from the highly localized support of the NURBS basis. The Jacobian matrix is thus given by

such that the Jacobian determinant of this transformation is given by

where the derivatives of the NURBS basis functions are computed by 4. The matrix  contains derivatives of the NURBS functions w.r.t. physical coordinates. So we need to find expressions for
contains derivatives of the NURBS functions w.r.t. physical coordinates. So we need to find expressions for  . By the chain rule we have
. By the chain rule we have



And thus, we may write
(14) 
Multiplying with the inverse of the Jacobian,  , from the right and taking the transpose on each side of the equation finally yields
, from the right and taking the transpose on each side of the equation finally yields

By successfully placing these expressions in the matrix , we may finally write

By carefully sequentially placing all values for  into the matrix we can compute the whole local stiffness matrix in one go by
into the matrix we can compute the whole local stiffness matrix in one go by

The integrals is approximated with quadrature rules. If we want to approximate the integral

the approximation by Gaussian quadrature is given by

where  are the number of integration points, and
are the number of integration points, and  and
and  are given quadrature points and weights, respectively.
are given quadrature points and weights, respectively.
A somewhat similar procedure as shown above is needed to approximate the surface integral in \eqref{Eq:loading}. The full expression will depend on which part of the surface we integrate over. As an example, consider integrating over a surface where  . As for the local stiffness matrix, we can compute the corresponding contribution to the load vector in one go as follows
. As for the local stiffness matrix, we can compute the corresponding contribution to the load vector in one go as follows

where



and

Here  contains the
contains the  and
and  component of the control point
component of the control point  . The integral may now be approximated by quadrature rules in two dimensions.
. The integral may now be approximated by quadrature rules in two dimensions.
It is very important to note that the global stiffness matrix is very sparse. Not only is it a huge advantage in MATLAB to have the matrix in sparse format when solving the linear system, but also when assembling the matrix. If the matrix is made sparse only after assembly, then the initialization would require MATLAB to allocated place for a full stiffness matrix. This is very memory consuming and should be avoided if one wants to run the program with many degrees of freedom. A matrix in sparse format contains 3 columns; the first two represent the indices in the matrix and the third column represent the corresponding value. A way to do this is to first construct these three columns in three arrays. By noting that each element stiffness matrix has ![\left[3(p+1)(q+1)(r+1)\right]^2](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-a1ae12ea620836f85d1b05420b79d5ea_l3.png "Rendered by QuickLaTeX.com") number of components, we initialize the arrays by the following.
number of components, we initialize the arrays by the following.

For each element, the element stiffness matrix is then added in the following way.
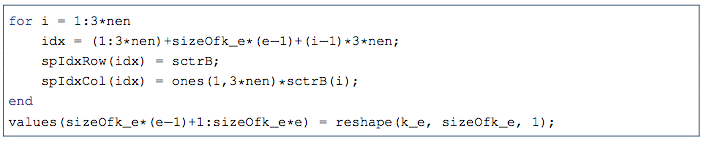
Note that we do not here sum overlapping element matrices, but this is automatically done when the sparse function is called in MATLAB.
![]()
That is, there will be index combinations which will repeat and therefore this method would require a lot more memory. The other obvious method is simply using
![]()
which typically results in the MATLAB warning “This sparse indexing expression is likely to be slow”. Experimentally we observe that the other method is 5 times as fast.
Post-processing
The visualizations is done in Paraview. Typically we create so called .vts files directly from MATLAB, and let Paraview do the illustrations from here.
We print the nodes, the displacement and every component of the stress for each node into such files. In addition we callculate the von Mises stress given by

which we shall use throughout the report in the visualizations.
One must make a grid in the classical FEM style in order to visualize the result. The mesh is simply created by finding the physical coordinates for each physical element. Moreover, for each corner of an element in the parametric space, the displacement and the components of stress can be calculated. Using the guide in “File formats for vtk version 4.2”, the file writing then follows by looping through each element and write data from each of the 8 corners each time.
MATLAB file structure
Hover the boxes to see subroutines and functions used. Click on a box to be directed to the source file.
Error analysis
It is always important to present some numerical evidence that the implementation is correct. This is typically done by finding an analytic solution and analyze the convergence of the numerical solution towards this analytic solution. Let the minimal order of the NURBS basis be given by

and let the maximal diameter of the elements (in the parametric space) be noted by  . In the error analysis we shall start by the simplest open knot vectors. That is, for we have
. In the error analysis we shall start by the simplest open knot vectors. That is, for we have  , such that
, such that  . In three dimensions we then have
. In three dimensions we then have  . Generally we have
. Generally we have

where we assume that the polynomial order is equal in all directions and we refine uniformly. The energy norm is defined by

where we compute the bilinear form by

![\begin{equation*} = \int_\Omega \left[\boldsymbol\varepsilon(\vec{u}) - \boldsymbol\varepsilon(\vec{u}^h)\right]^\transpose \vec{C}\left[\boldsymbol\varepsilon(\vec{u}) - \boldsymbol\varepsilon(\vec{u}^h)\right] \idiff\Omega \end{equation*}](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-15d741f4df8d7a44a415f473d93b130b_l3.png "Rendered by QuickLaTeX.com")
![\begin{equation*} =\sum_{e=1}^{n_{el}}\int_{\Omega^e}\left[\boldsymbol\varepsilon(\vec{u}) - \boldsymbol\varepsilon(\vec{u}^h)\right]^\transpose \vec{C}\left[\boldsymbol\varepsilon(\vec{u}) - \boldsymbol\varepsilon(\vec{u}^h)\right] \idiff\Omega, \end{equation*}](http://org.ntnu.no/skimodeling/wp-content/ql-cache/quicklatex.com-62c2258ba43d8f20d4cf4be492f82a3b_l3.png "Rendered by QuickLaTeX.com")
using the same technique with transformation to the parent element for integration with quadratures. Thus, we need to compute  in order to do the error analysis.
in order to do the error analysis.
In the article “Isogeometric analysis using polynomial splines over hierarchical t-meshes for two-dimensional elastic solids” we find the following estimate

where a quasi-uniform mesh refinement has been assumed. The constant  is among other things dependent of the transformation from the parametric space to the physical space. It is not however depending on
is among other things dependent of the transformation from the parametric space to the physical space. It is not however depending on  . So as become smaller, we expect the convergence to be of order . Of course, the analytic solution (and then also the norm) should be independent of , so we shall divide by
. So as become smaller, we expect the convergence to be of order . Of course, the analytic solution (and then also the norm) should be independent of , so we shall divide by  to normalize the error.
to normalize the error.
We want to do an error analysis with an analytic solution and a geometry which is to some extent similar to what we shall use when analyzing the flex of skis. Analytic solution (with corresponding data) on complex domains is in general hard to find. We shall restrict our self to a domain given by

where  ,
,  and
and  is the width in
is the width in  ,
,  and
and  direction of the beam, respectively. In the following we shall present several analytic solutions with corresponding illustrative plots and convergence plots. In the first two cases we choose these three parameters, such that the domain looks like a plank in a way that
direction of the beam, respectively. In the following we shall present several analytic solutions with corresponding illustrative plots and convergence plots. In the first two cases we choose these three parameters, such that the domain looks like a plank in a way that  . In all test cases we want to construct solution which have homogeneous Dirichlet boundary conditions at
. In all test cases we want to construct solution which have homogeneous Dirichlet boundary conditions at  . The boundary conditions corresponding to each solution and the analytic expression for can be found in Maple files.
. The boundary conditions corresponding to each solution and the analytic expression for can be found in Maple files.
One of the simplest example that comes to mind is the solution
(15) 
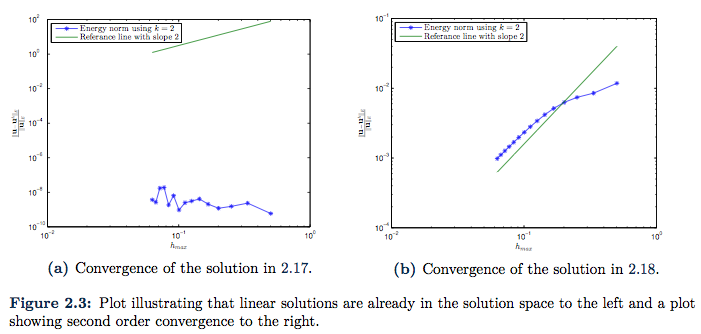
which is plotted in Figure 2.1. Of course, such linear solution is already in the search space  , so we should expect the error to be near machine epsilon. And as we can see from the convergence plot given in Figure 2.3a this is indeed that case. Here the error is more likely to originate from the approximation in quadrature rules.
, so we should expect the error to be near machine epsilon. And as we can see from the convergence plot given in Figure 2.3a this is indeed that case. Here the error is more likely to originate from the approximation in quadrature rules.
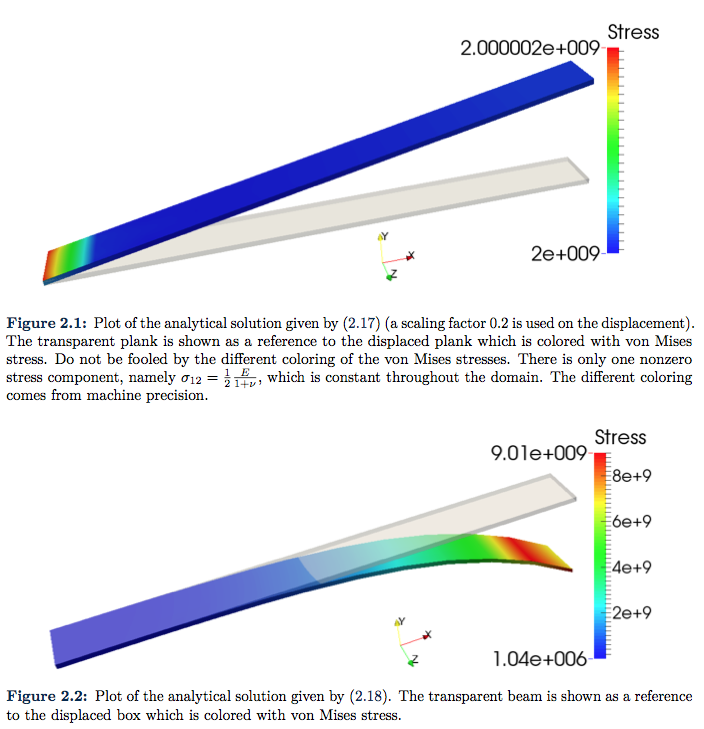
A more complex solution is given by
(16) 
The plot of the solution is shown in Figure 2.2. The analysis is done with second order NURBS, so since the analytic solution has a third order polynomial in the direction, the solution is not in the search space . The convergence plot is presented in Figure 2.3b. The order of convergence is not impressive in the beginning, but it get’s closer to the expected second order of convergence as the element size get’s smaller. This is probably due to the constant , which we shall present evidence for in the next case.
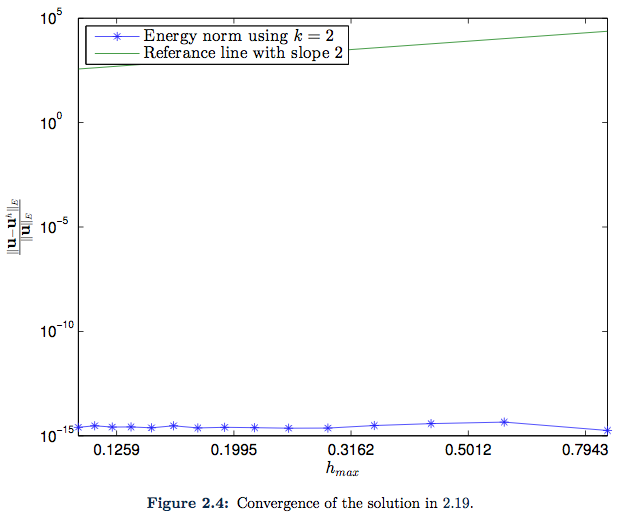
A more regular domain would be to choose  , i.e. a cube. All though we have not presented so much theory on the case
, i.e. a cube. All though we have not presented so much theory on the case  we shall present this case on the remaining three cases. For simplicity we construct the solution such that they are zero on the boundary of the cube. That is, we only have homogeneous Dirichlet boundary. Consider the solution
we shall present this case on the remaining three cases. For simplicity we construct the solution such that they are zero on the boundary of the cube. That is, we only have homogeneous Dirichlet boundary. Consider the solution
(17) 
It does indeed satisfy the conditions with a rather ugly resulting function  (the expression for this function is in fact so complex that we do not even bother to include it in the appendix). Once again, since this solution only has degree two for each polynomial in each of the spatial direction, the solution is thus an element in the search space , so we should expect the error to be close to machine epsilon again. As we can see from Figure 2.4 this is indeed the case.
(the expression for this function is in fact so complex that we do not even bother to include it in the appendix). Once again, since this solution only has degree two for each polynomial in each of the spatial direction, the solution is thus an element in the search space , so we should expect the error to be close to machine epsilon again. As we can see from Figure 2.4 this is indeed the case.
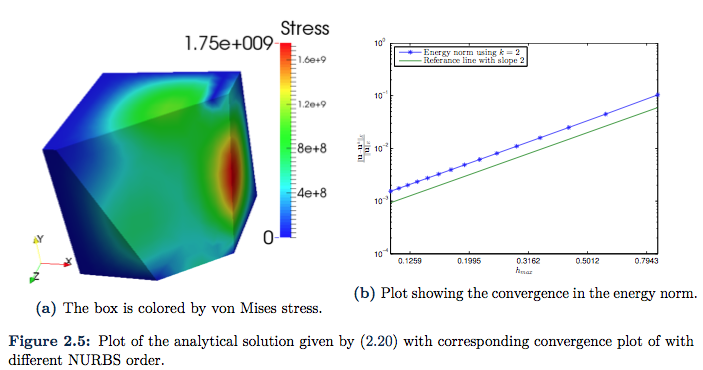
By multiplying the solution in 17 by another factor ,
(18) 
we get a solution which should not be in the search space . The condition on the boundary does of course still hold, but now we have an even more complex function . The displacement of the cube is not so illustrative, rather, we cut of a part of the cube such that we can see the von Mises stress at a plane inside the cube as well. This plot is given in Figure 2.5a. The convergence plot is given in Figure 2.5b, and we here observe instantaneously convergence of second order.
The finale example is presented just to illustrate that we have the same type of convergence when Neumann boundary condition is implemented. We plot the same analytic function in \eqref{Eq:secondAnalyticalSolution}, but here we choose . The resulting plots are given in Figure 2.6 and Figure 2.7.
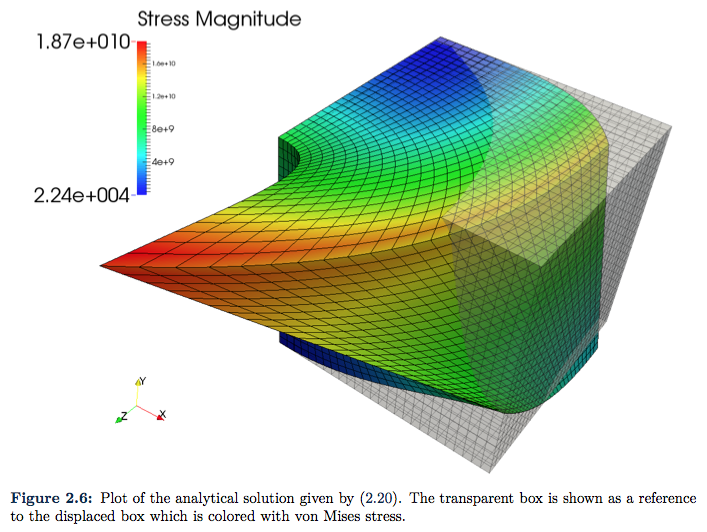
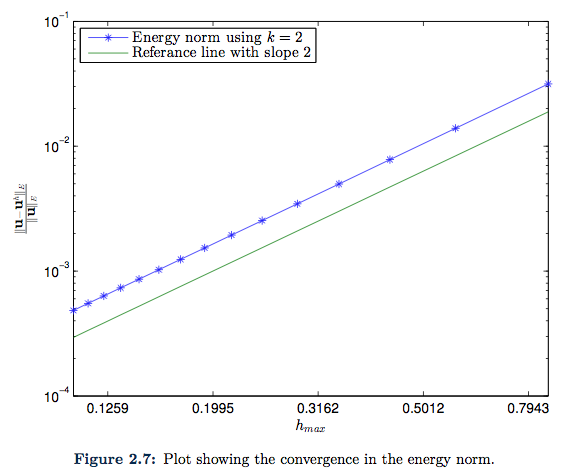
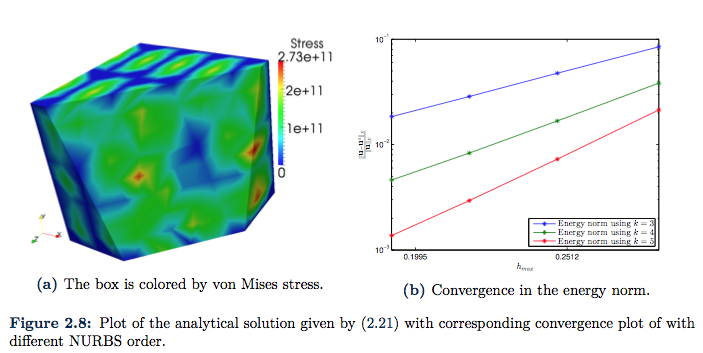
All of the discussed solutions have been polynomial solution, and whould thus potentially be in the solution space if we elevate the order of the NURBS. Thus, the solutions presented so far does not fit so much for analysis on the order elevation of NURBS. A trigonometric solution given by
(19) 
will also satisfy homogeneous Dirichlet boundary conditions at the boundary. The resulting plots are given in Figure 2.8a and Figure 2.8b. In the convergence plot, we illustrate the different convergence rates by eleviating the NURBS order. It should be noted that the convergence is slightly better than  .
.