MAROFF KPN: Digital Twins for Vessel Life Cycle Service (TwinShip) (2018-2021)
The project is supported by Knowledge-building Project for Industry (KPN)
Project partners
- NTNU in Ålesund
- Kongsberg Maritime AS (before called Rolls-Royce Marine AS)
- DNV-GL
- SINTEF Ålesund
- Ålesund Kunnskapspark AS
Project Description
The goal of this research is to develop digital twins of maritime systems and operations, which is an open virtual simulator as the next generation of marine industrial infrastructure not only for overall system design, allowing configuration of systems and verification of operational performance, but also more focusing to provide early warning, life cycle service support, and system behaviour prediction (Figure 1).
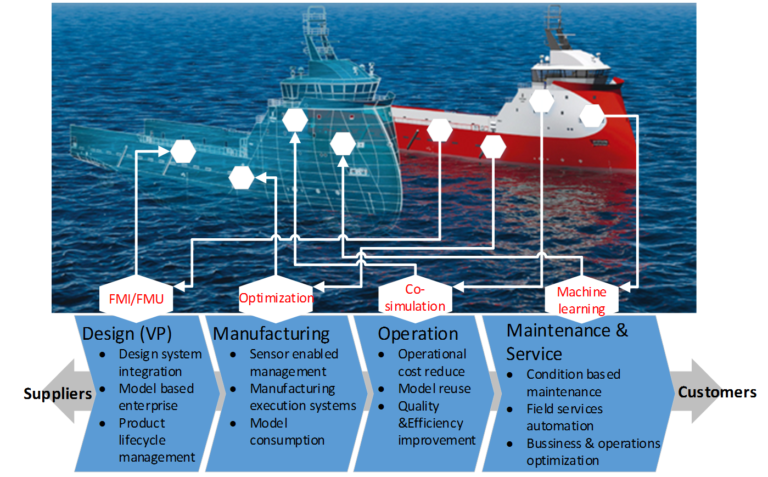
Figure 1. The development of digital twins system for marine industry
Working packages
- WP1 – Develop an open digital twins platform for marine design, operation, and maintenance.
- WP2 – Development tools for early warning, prediction, and optimization based on digital twins for maritime industry.
- WP3 – Demonstrators – Subsystem and operational verification process.
Workshops
- KPN Twinship Kick-Off Meeting, 20 June 2018, NMK II.
- KPN Twinship WP2 workshop, 13 December 2018, NTNU i Ålesund.